1.1 移動モード (歩行/自転車/車)とスムージング処理
GPS受信機によっては、その搭載を想定している応用先によって移動モードと云う物が有ります。 例えば、歩行モード・自転車モード・車モードの3つです。 中にはソフトウェアで切り替える機能を持つ物も有りますが、安い受信機だとこの調整機能は殆どないと思って下さい。 このモードの違いは、基本的にはスムージングの調整と速度マスクに影響します。
例えば、このモードによって図1.1の様にスムージングの強さが変わります。 歩行者であればふらついて歩くこともあるので、受信機から出力される結果は生の計算結果に近い物になります。 一方、車で有ればそんなふらつく訳が有りませんので生データの移動平均や予測(ジャイロや加速度センサも有るけど)を採り入れて出力されます。 図1.2へフィルタ設定の違いによる影響を確認した実測データを示します。 許容される加速度の違いにより、測位解に大きな差が生じていることが分かります。
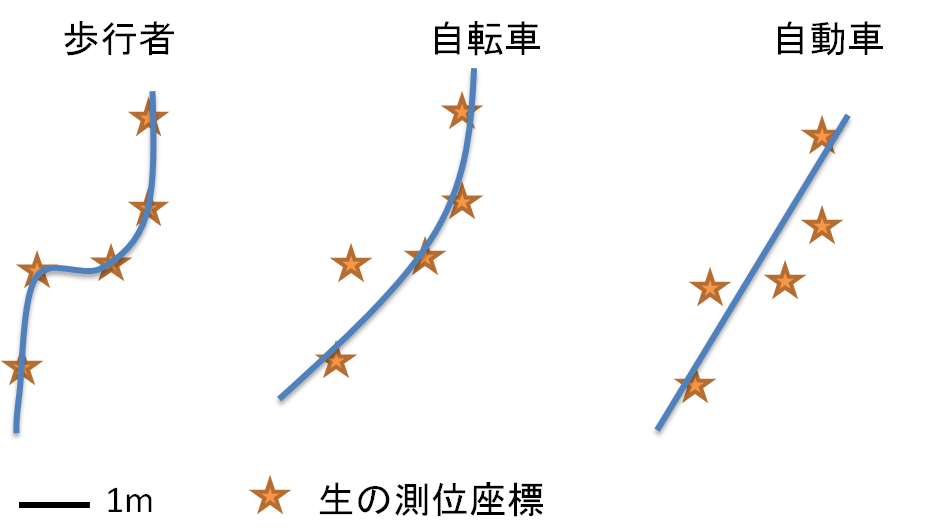
図1.1 GPS受信機の測位モード(歩行者/自転車/車)
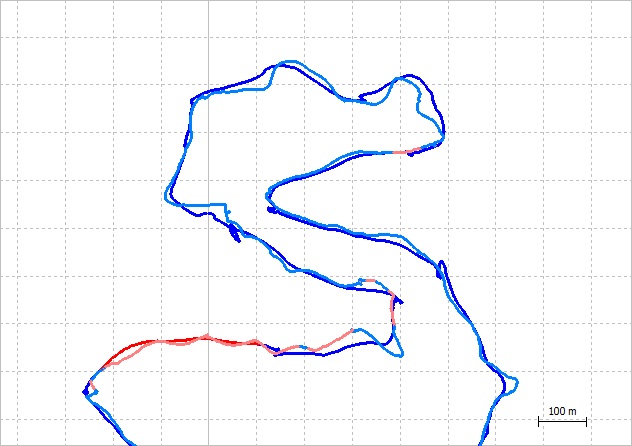
図1.2 u-blox 6Tで計測した測位モードの違い(Stationary/Portable), 単独測位
加えて、受信機によってはある程度の速度で移動するか、静止地点から一定距離離れるなどしない限り位置を更新してくれなかったり,妙に測位点が飛んだり,細かい変化が全く分からないなど個性が有ります。 これらを考慮に入れた上でGPS受信機は組み込まないと痛い目にあいます。 ただ位置が分かればよいと言っても、間欠動作するのか,移動中の位置精度はどうか,静止中の処理は・・・など応用例により様々ですので、それぞれに合わせて使う必要が有ります。
ここで言う移動モードの調整が可能な受信機と不可能な受信機の一覧を以下に示します。
| 設定可能な受信機 | ubloxシリーズ |
| 設定が不可能な受信機 |
1.2 受信感度
GPS受信機の感度とは、どれだけ低い受信強度でコードを追跡できるかと云う事を指します。 2006年頃から高感度型GPS受信機と云うものが出てきたように思います。 基本的には、積分時間を延ばすことで感度を伸ばすという事をやっているようです。 その他、マルチパスだろうが何だろうが受信するという手段も採られています。 従って、受信機によっては結構測位点がバラついたりして信頼できないことがしばしばあります。
森林中で使う予定が有るのなら、迷わず高感度型を選びましょう。 ただし、測位精度には受信機の個性が非常に有りますので選定には注意が必要です。
1.3 初期位置算出時間(TTFF: Time To First Fix)の短さ
TTFFとはGPS受信機の電源を入れてから位置情報が出力されるまでの時間を指します。 最近の高感度GPS受信機で有れば大抵はTTFFが短くなって来ています。 TTFF短縮技術もいくつかあり、それぞれ特徴が有ります。 以前の低感度GPS受信機であれば、TTFFを短縮するためにはアルマナックやエフェメリスが分かっていることが重要でした。 これはドップラシフト量や可視衛星を判断して数少ない相関器を効率よく利用するのに必要なためです。 現在では100近い相関器を持つものもあり、瞬間的にドップラ周波数・疑似距離に対する全域検査を掛けて瞬時に相関値を割り出すのが普通です。 さらに、一部の受信機では放送メッセージ内容の予測も行う事で相関値を高め、同期を早く取ることが出来る様です。 と云う訳で、最近の受信機はたいてい電源を入れてから3秒以内のホットスタートを誇示するものが多くなっています。 が、TTFFにもメーカーの考え方による個性があり、受信環境が悪かったり古いアルマナックしか持っていなかったりすると完全に航法メッセージを取り直すこともあり、一概に言えません。
1.4 マルチバス抑制
マルチバスとは、建物の壁面や路面などで反射した電波のことを指します。 このマルチバス波は反射波ですからその分本来の直線距離より長い距離を飛んできたことになります。 そのため、もし信用して計算すると測位誤差が増えてしまいます。 測量用の受信機ではこのマルチバスを抑制する技術が多数取り入れられており、より正確な測位を行う工夫がなされています。
1.5 搬送位相情報出力の有無
これはGPSの測距信号を乗せる搬送波を追跡し、この位相情報を出力する機能です。 RTKをやるなら必要な機能ですが、比較的特殊用途に限られます。 私としては近い内に試したい機能ではありますが、まだ取り扱ったことが有りません。
1.6 その他、注意が必要な点
ハードウェア的に留意が必要な点についてまとめてみました。 先ず、バックアップ電源の用意が必要かどうか,電源電圧は何ボルトか,消費電流の最大はいくらか, 消費電流の変動はどの程度か(ノイズ・リプル対策),電源に乗っても良いリプルと受信感度の関係は?, 出力信号のレベルはTTL(High:Vcc, Low:0V) Or RS232C(High:+10~15V, Low:-10~-15V)か, 1PPS信号は必要か,アンテナの近くに***が有っても大丈夫か?(実際に組み立てないと不明), 外部アンテナは必要か?等です。 これらはそれぞれがバッテリの種類やコンデンサの容量,レギュレータの出力電圧,レベル変換ICの必要性,時刻同期が必要か,どうかなどと関係しています。